LAUSANNE, Switzerland (Reuters) — Mori combines origami robots and reconfigurable, modular robots, a unique marriage say its creators at Switzerland’s École polytechnique fédérale de Lausanne (EPFL).
Current origami robots consist of thin structures that can be folded into a single robot that changes shape. In modular robotics, by contrast, multiple individual robots are used, but are bulkier and more complex.
Origami robots are restricted by both the size and folding pattern of the sheet used and the resolution of folds that can be created.
Christoph Belke, a PhD student at EPFL’s Reconfigurable Robotics Lab (RRL), and lab director Jamie Paik believe their solution integrates both robotics types to overcome their individual limitations.
Paik told Reuters: “We are moving to the next generation of origami robots that are easy to manufacture, mass produceable. We want them to communicate with each other so they can create different workforce tasks under a remote environment which larger or more expensive robots have difficulties getting into.”
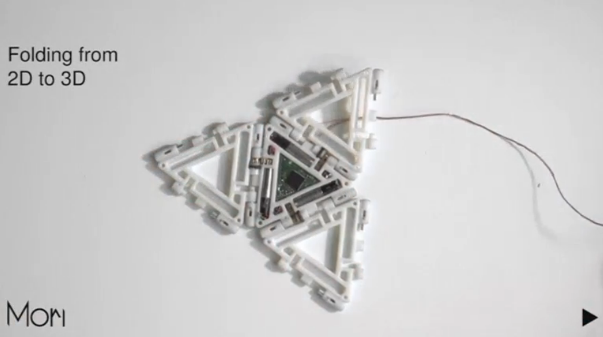
The Mori prototype incorporates a small, symmetrical, coupling mechanism with a rotating pivot. Each module can be attached to any other and folded in any formation. Once connected, the modules can fold into a variety of shapes.
They are also inexpensive to make, rendering any breakages unimportant.
“You should not cry over lost or broken robots,” said Paik. “We want this to be a cheap, easy, solution for transferring information. These robots can crawl, hop, and even jump to get over different types of obstacles.”
Each individual module has a triangular structure and is just 6 millimetres thick, weighing a mere 26 grams. Actuators, sensors and an on-board controller make it work, as EPFL PHD student Zhenishbek Zhakypov explained.
“Multiple layers of flat sheet material are folded together to obtain a 3D shape of the robot. Then we introduce other components, like electronic components for sensing and communication, as well as a battery for powering on-board,” he said.
In tests individual Mori robots were assembled into a reconfigurable surface, which changed shape according to the user’s input. Single modules were manoeuvred through small gaps, using rubber rings of rotating pivot as wheels. Coupled with feedback from an external camera, the “platform design” version of the robots, using four Mori modules, was able to manipulate objects with closed-loop control.